
DUMP
*
DUMP *
Dynamic Uprightness Management Platform
DUMP is the first officially deployed product of ASS (Advanced Shitbox Systems) a corporation founded for the sole purpose of improving a 1994 Mitsubishi Delica while simultaneously justifying an escalating interest in microcontrollers.
Using an MPU6050 accelerometer, a modest Arduino, and an unnecessary amount of determination, DUMP calculates how much each wheel must be raised to achieve a level sleeping position.
What began as “a simple leveling indicator” expanded into a custom PCB, a KiCad education, and a graphic identity program that may be slightly more elaborate than required. It is not a standalone object. It is the first node in a ceiling-mounted ecosystem of modules that will eventually resemble either a spacecraft panel or a questionable decision.
Both outcomes are acceptable.
Industrial Honesty,
With Typography
Graphic Philosophy
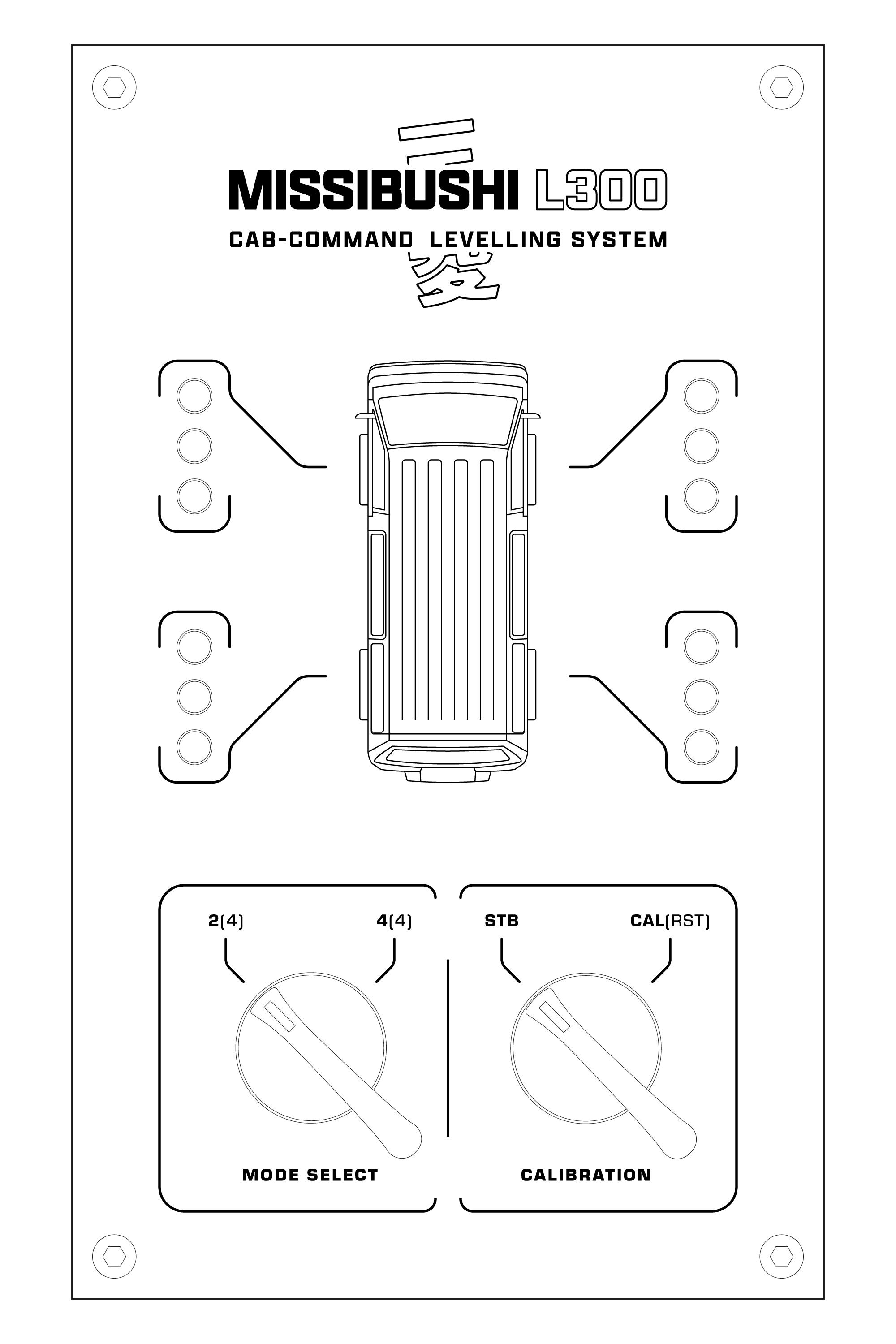
The faceplate was designed as if the device had always existed. Labels are clear. Warnings are calm. The grid is strict. The language is slightly more formal than strictly necessary.
This is deliberate.
A device that determines whether you sleep at three degrees of incline or at zero deserves composure. Every marking serves a purpose. Every purpose is expressed without decoration. The seriousness is measured, but not accidental.
Information Hierarchy
The layout mirrors the mathematics beneath it. The four wheel positions are arranged exactly as they exist under the van. LED clusters follow axle logic. Controls are physically and visually separated by consequence: mode selection is not calibration, and calibration is not something to be confused in the dark.
Typography scales with importance. Structural elements are bold. Secondary references are restrained.
Controlled Absurdity
“Dynamic Uprightness Management Platform” is both technically correct and mildly theatrical.
The graphic layer performs two functions. It communicates clearly in low light, and it implies that a significant system is in operation.
In practice, it ensures horizontal sleep.
That is sufficiently significant.

THE CODE
Written with assistance. Uploaded with courage.
Every iteration was a coin toss:
Would it finally work, or accidentally hack NASA?
I did not yet possess the knowledge to fully verify the logic. So I relied on observation.
If it compiled and nothing caught fire, we called it progress.
DESIGN & BUILD PROCESS
-
The panel and ceiling mount were carefully designed in 3D using a powerful combination of software, intuition, and the phrase “that should hold.”
It was then half-arse engineered with great confidence and sent to a sheet-metal supplier who, to their credit, did not ask too many questionstions.
-
Also known as: scrolling.
Hours were invested combing AliExpress, Amazon, and eBay for components that were cheap, vaguely compatible, and described as “industrial grade” by someone with admirable imagination.
If it shipped worldwide and had at least one review that said “works good,” it qualified.
-
Lacking formal engineering education but possessing Wi-Fi, I deployed a distributed advisory board consisting of Gemini, ChatGPT, and Claude.
Together we vibe-coded.
We discussed best practices, elegant architectures, and clean, readable code, occasionally producing some.
-
At some point the breadboards began to resemble modern art installations.
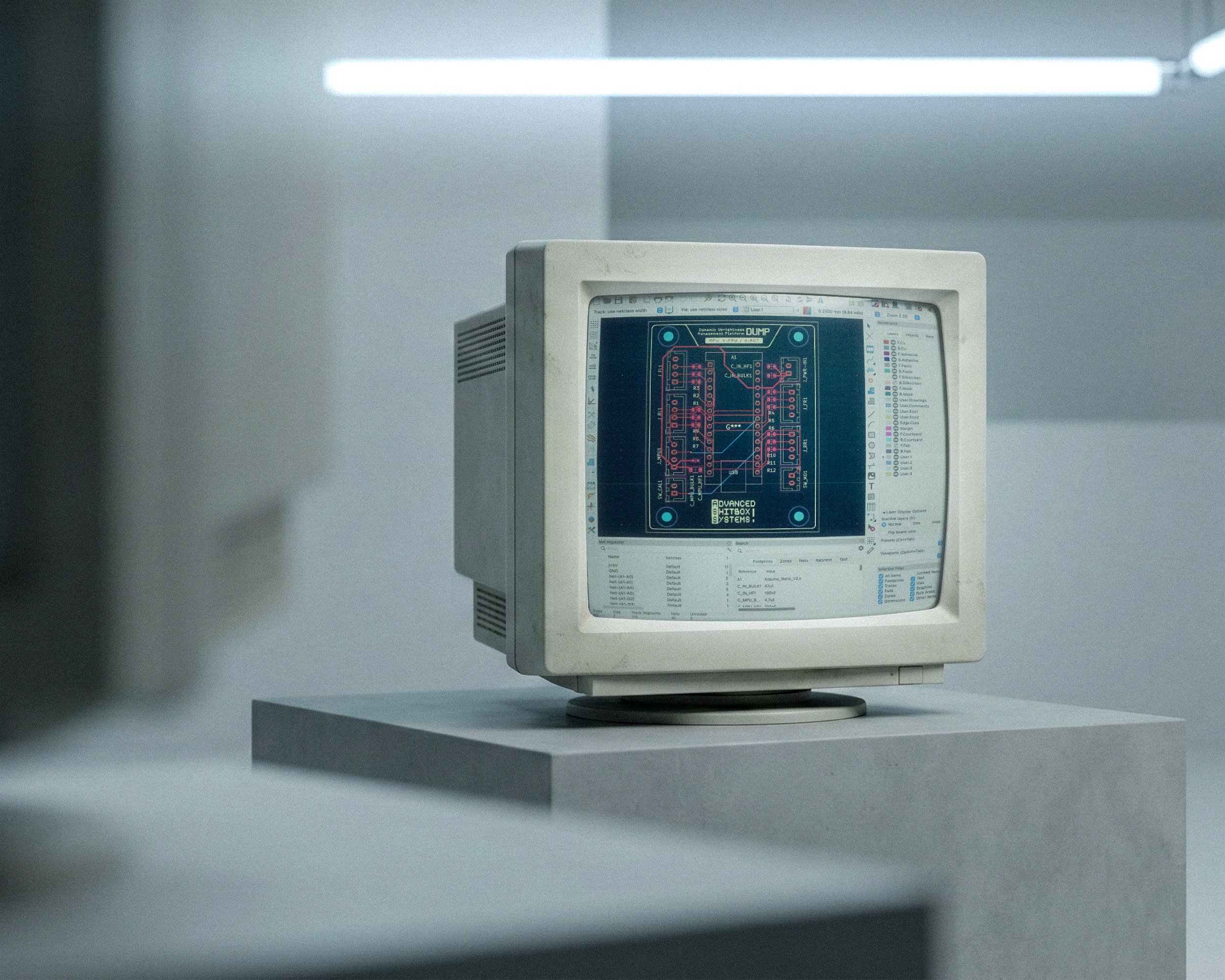
This is usually the moment when one decides to learn KiCad.
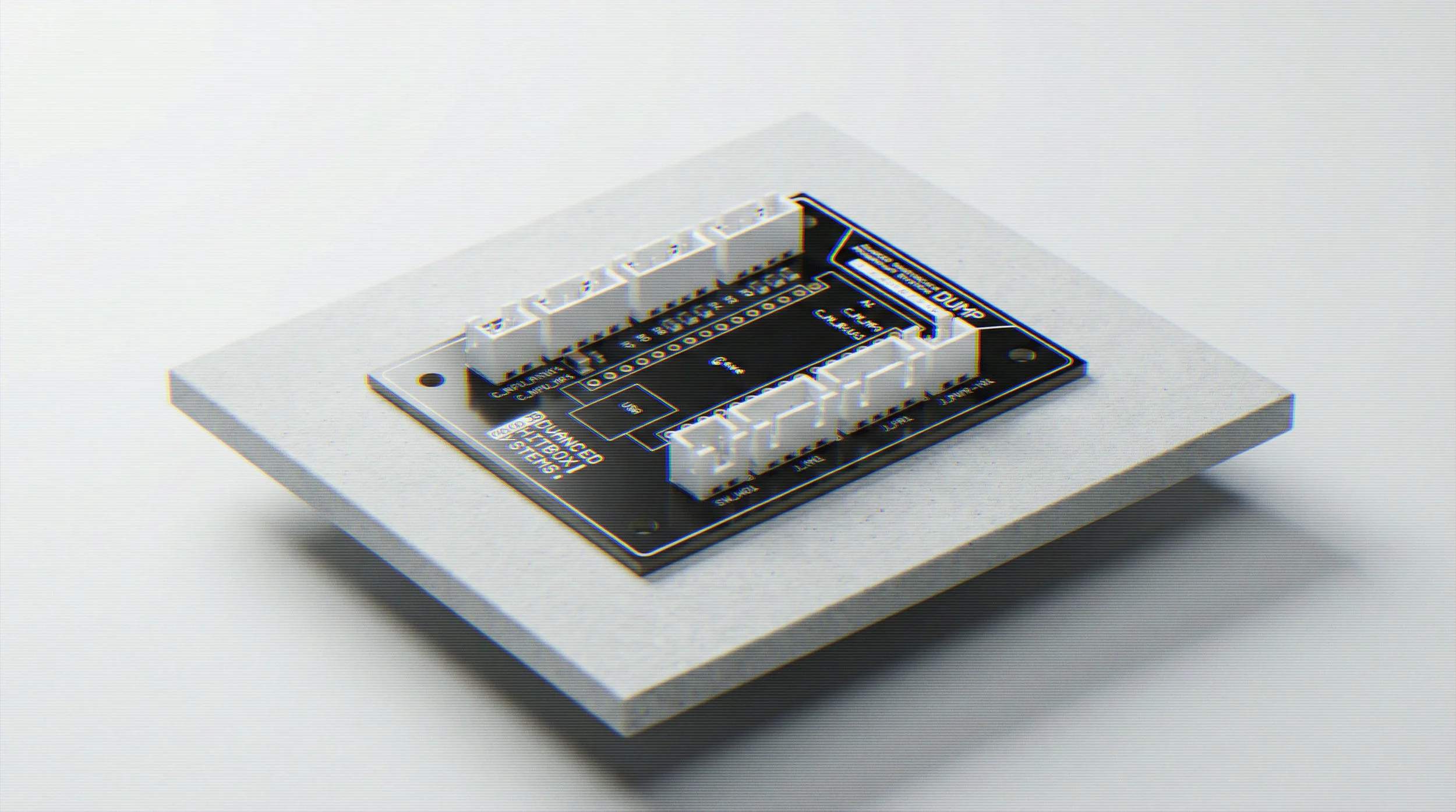
After a brief but intense self-education in footprints, traces, copper pours, and the subtle psychological effects of ground planes, the project evolved from “a pile of wires” to “an actual circuit board.” The files were sent to a manufacturer.
Real PCBs arrived in the mail.This was both deeply satisfying and mildly alarming.
-
The first circuits were assembled on breadboards using jumper wires, optimism, and an expanding vocabulary of swear words.
Some things worked immediately.
Most things worked eventually.
A few things worked briefly and then achieved enlightenment through smoke.
Honourable mention:
the PCB
The Breadboard Phase
Early prototypes are usually simple. The first version makes sense. The second improves something. The third adjusts a few details. After several iterations the system still works, but the logic behind it has slowly drifted.
Small changes accumulate. Connections move. Assumptions change. Eventually the prototype follows the universe’s natural tendency toward entropy: everything functions, but no longer in a way that can be easily reconstructed.
The PCB Phase
That is usually the moment one decides to learn KiCad.
After a concentrated crash course in schematics, footprints, and PCB routing, the design was rebuilt from first principles as a proper circuit board. The files were sent to a manufacturer somewhere on the internet.
A few weeks later real PCBs arrived.
They looked calm, organised, and reassuringly intentional.